I’ve lifted up Quanum venture of 450 class drone. She was beautiful and nice looking drone. But it hasn’t enough power to load gimbal and camera, and not enough flight time which was around 10 mins without gimbal&camera. It maybe solution attach a big battery like 10,000mah. But there wasn’t enough room to carry this in the bay.
So I decided to build a new drone which is light weight, more powerful, able to carry more payload and easy portable.
Here is the part lists:
- Frame : XJ470 carbon folderable frame kit
- Motor : Sunnysky X-3108S 720KV
- ESC : RCtimer 20A SimonK firmware opto.
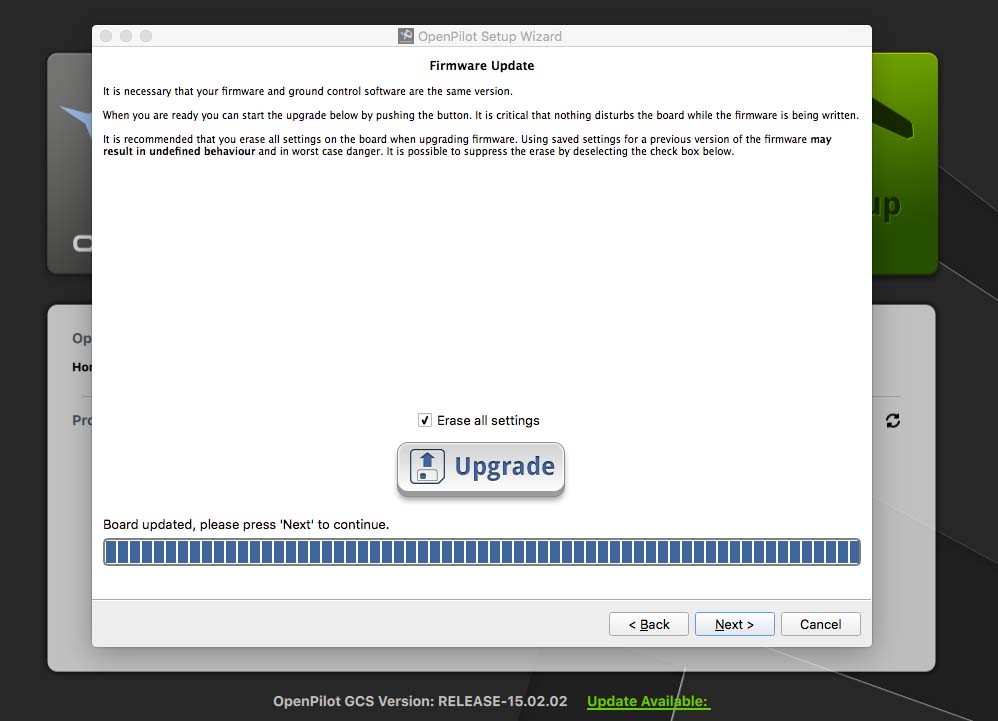
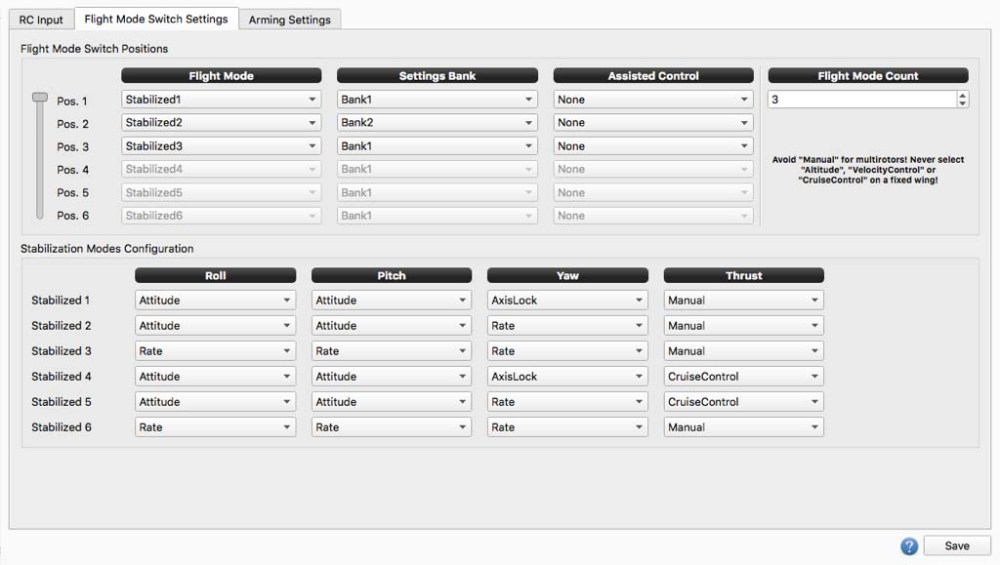
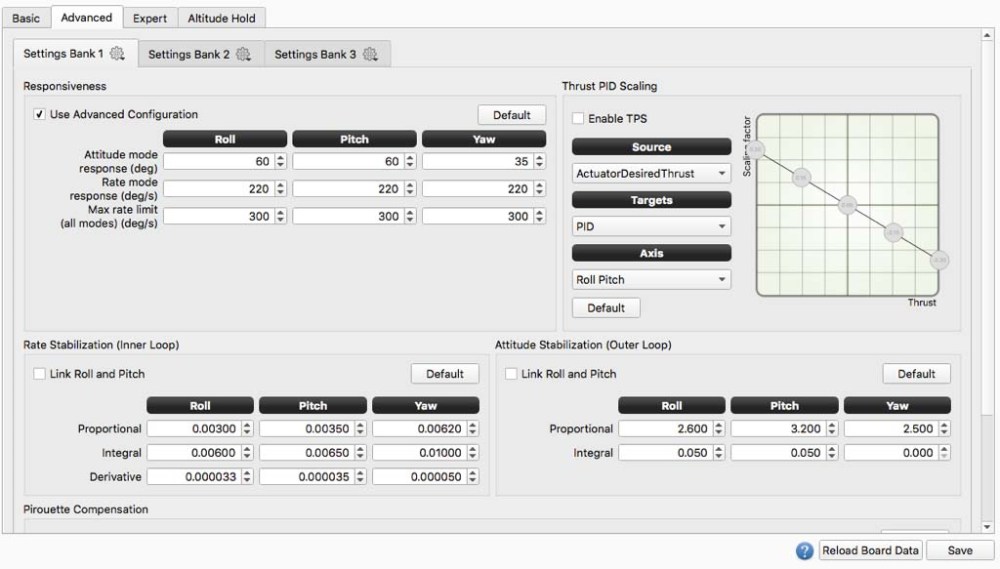
- FC : APM 2.6 flight controller
- Receiver : Devo 701 7CH RX
- Telemetry : 3DR radio telemetry v2
- GPS : Ublox Neo-7M
- Power distribution board : Quanum power board with 5v/12v BEC
- LED : KK260 LED module (5V)
- Video Tx : Boscam 5.8Ghz 200mw Video transmitter
- APM power module 2.6
- Gimbal : Walkera 2axis gimbal
- Camera : Xiomi Yi
- Propeller : APC 1238 propeller
- Battery : Multistar 4s 5200mah 10C
This is Frame kit. I think this body wasn’t big enough to put those parts. Actually, I spent some hours to layout and placed the parts in small space. But the arm length is enough long to attach 12inch prop. Overall frame weight was over 400grams.

Here were the part lists what I built. The motor size was big what I expected. The frame were composed to 3k carbon fiber and aluminum, no cheap plastic parts. This was so cool.

At fist I assembled the hinge spacer parts onto under plate.

This is landing skid assembly. I think this is a little bit short. I may need to order longer compatible bar.
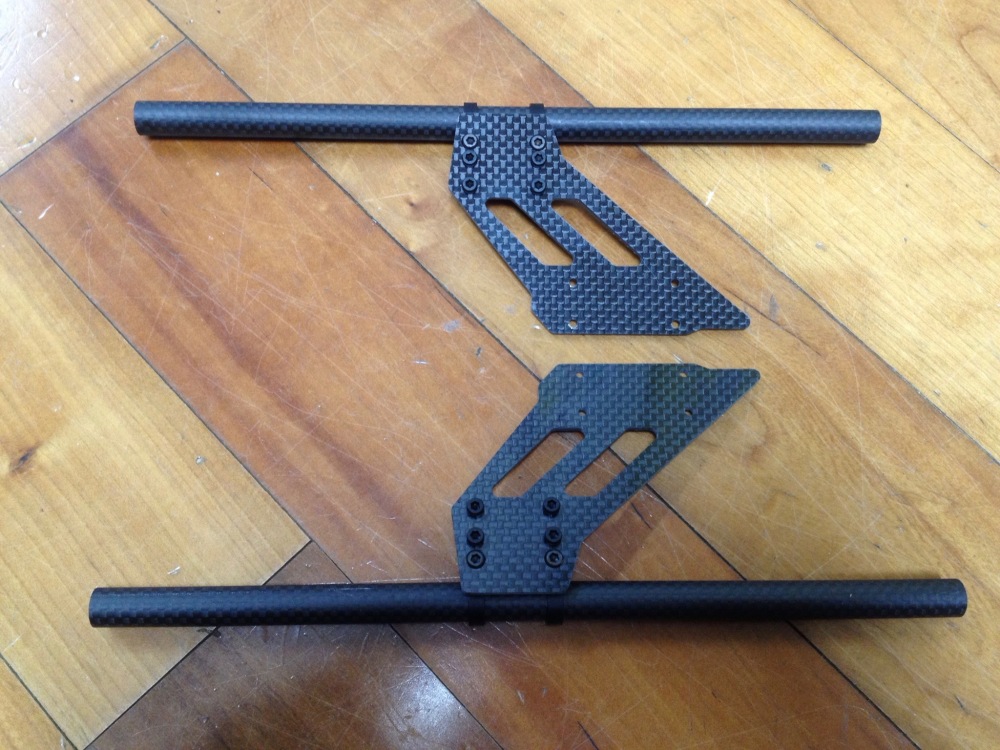
And I attached these under the under plate.
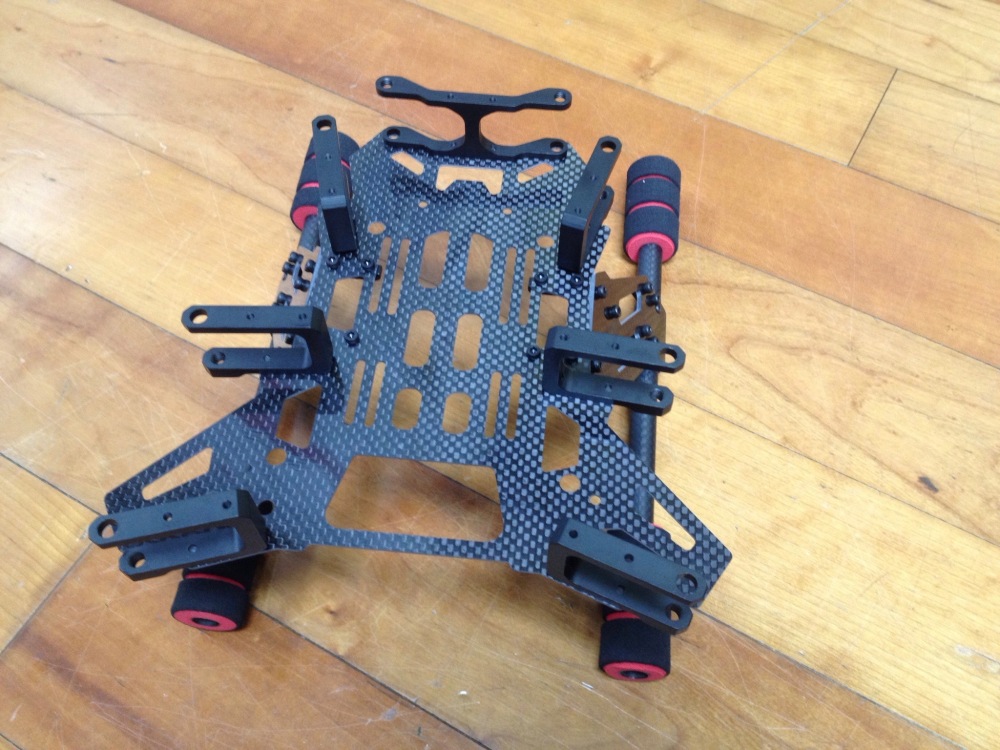
This is arm assemblies. Back arms are a little bit longer than front arms.

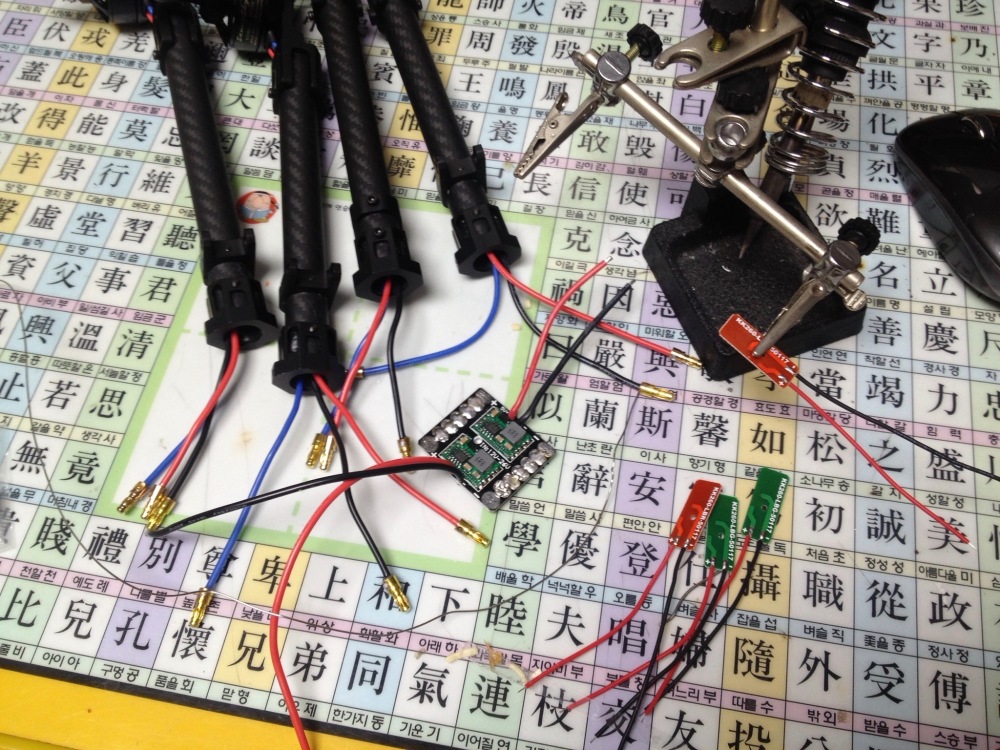
Then I attached 4 motors onto each motor mount of the each arm, take out the motor cables through hollow arm, soldered banana connectors at the signal cables, attached wires for 5V/12V power onto power distribution board and prepared LEDs where will be placed under the motor mount.
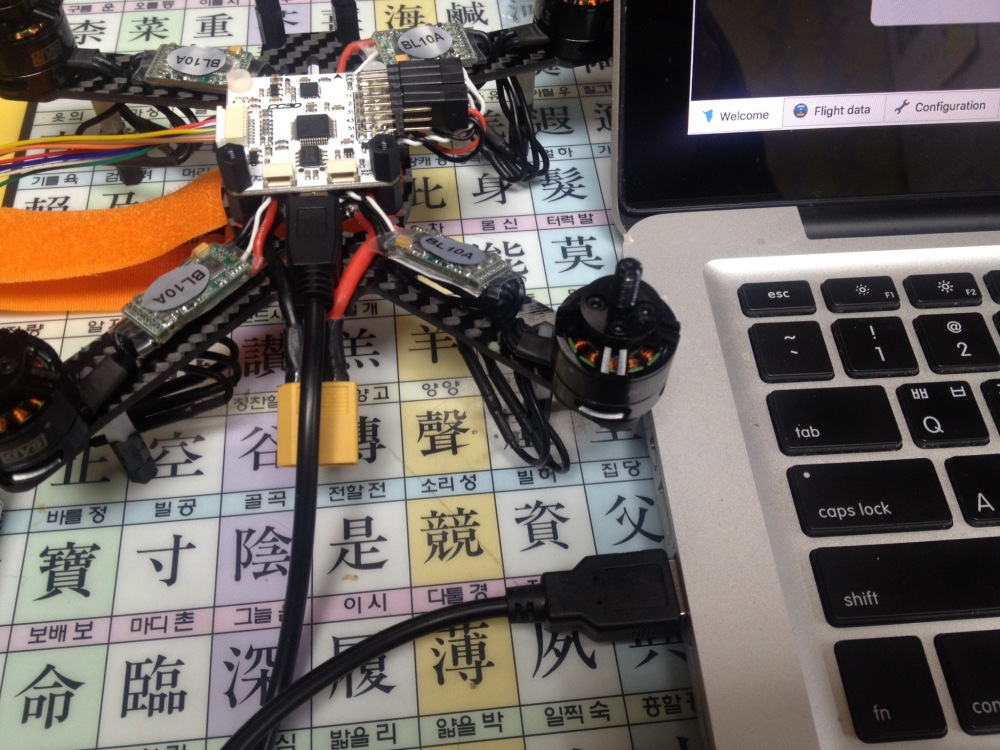
I struggled find out a space to put 4 ESCs for several hours. It should be thin or mini ESCs so that could insert these into each hollow arm. Anyway this is the solution what I found that placed two ESCs onto front side, another two ESCs onto back side and tighten these up using cable tie, and then placed power distribution board onto back side ESCs, and soldered power wires of ESCs.
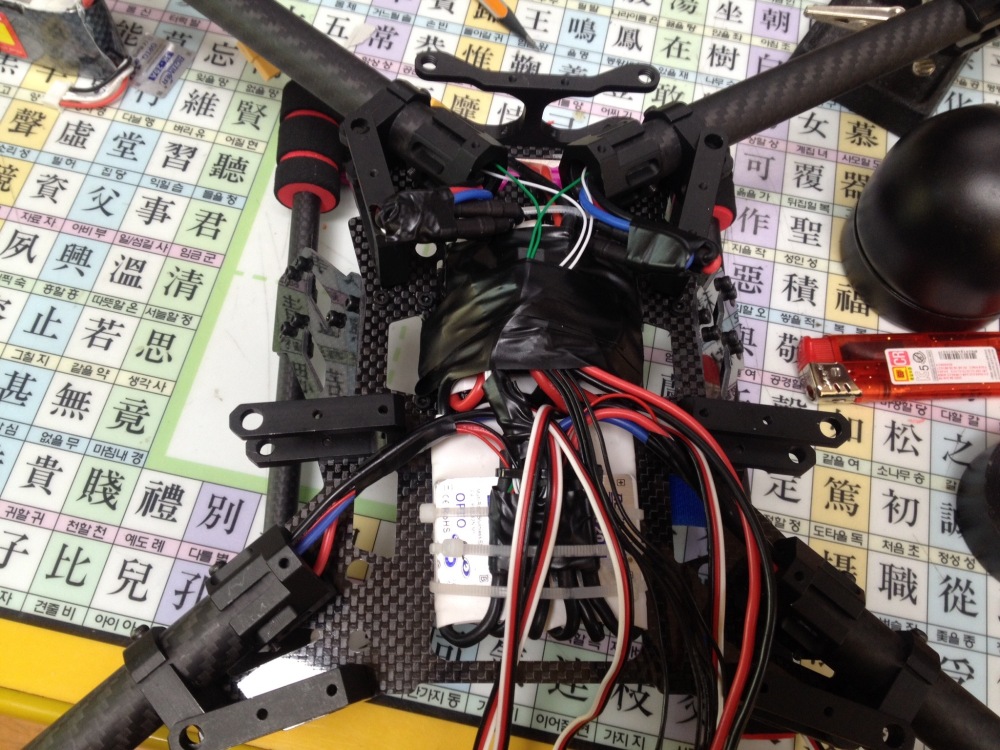
Next was put upper plate hinge spacer and take out the wires.

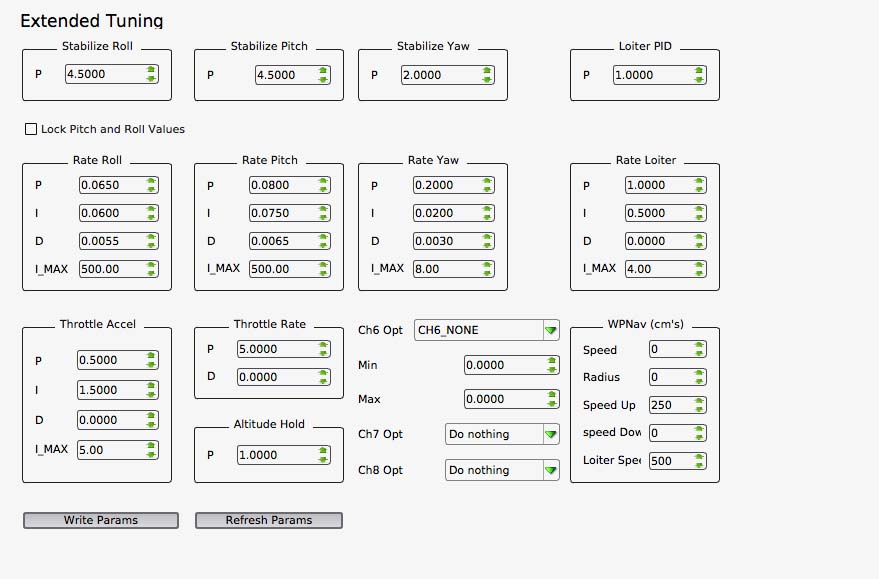
And I put the APM FC board onto center of gravity, and connected RC receiver and 433Mhz radio telemetry.
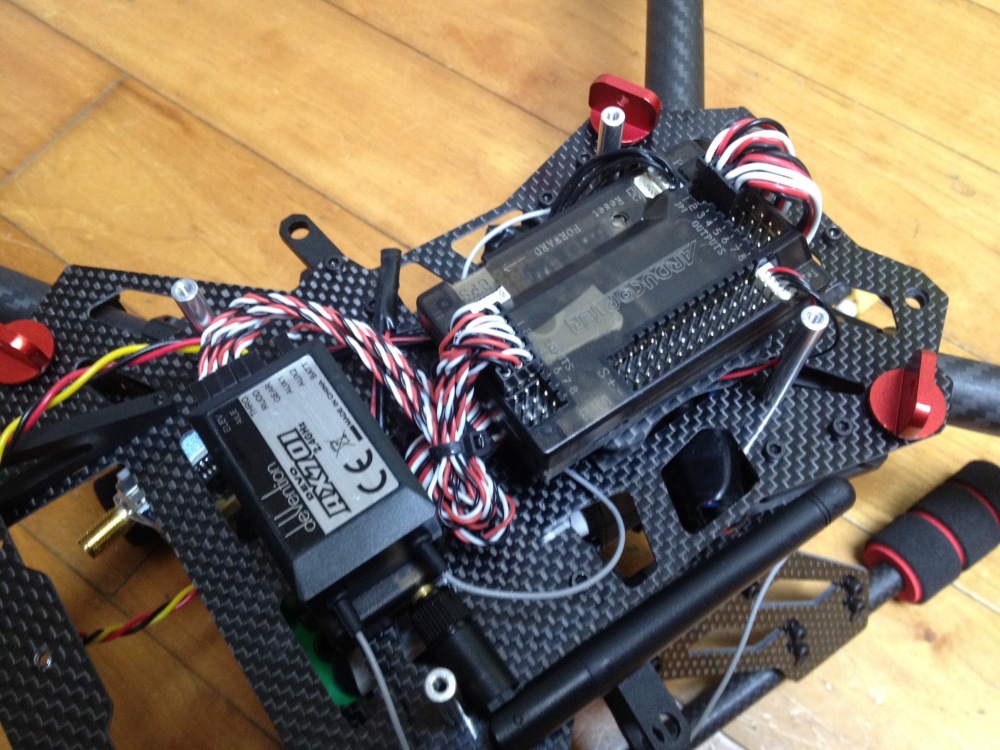
Final extra things were attaching LEDs, mounting gimbal, connect 5V power & video signal cables into Xiaomi action CAM, attaching GPS and Video TX. I drained 5V power for action CAM from APM FC.
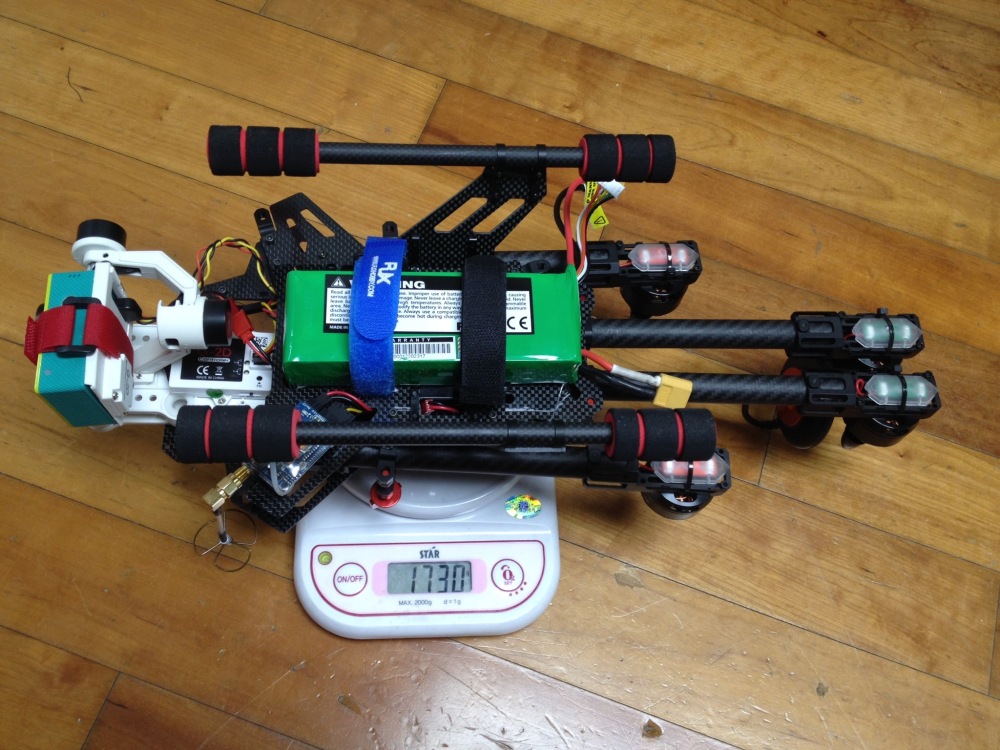
Here is the result:

And this is the figure when she was folded.

Total weight including CAM gimbal set and 5200mah battery was over 1.7KG. I’m afraid that she can hover for 20mins with 12inch props. It will be under 15 mins in my guessing.